Advanced Binary Search Algorithm
The Importance of Binary Search?
I feel like writing nonsense. I hope you don’t take this article too seriously.
There are algorithms I’ve heard of but do not understand (and how many have I not even heard of yet).
- Li-Chao Segment Tree
- Lazy Segment Tree
O(n)/O(1)range maximum query- Self-balancing trees excluding treap
- Link-Cut Tree
- Wavelet Tree
- Merge Sort Tree
- Binomial Heap
- Fibonacci Heap
- (And many other obscure algorithms that are not worth mentioning)
If you know at least three of these yet your Codeforces rating isn't red, you are doing something wrong. Stop learning useless algorithms, go solve some problems, and learn how to perform binary search.
Source: Um_nik's post from 2021 (Um_nik has been a stable Legendary Grandmaster since 2017)
Introduction
This is City. I have been involved in algorithms for quite a while, and someone asked me how to understand the principles of binary search and how to approach relevant problems, which led me to write this follow-up to my previous article on the application of binary search.
In this article, I aim to explore various implementation methods of binary search and delve into its intricate workings for a better understanding.
The illustrations used in this article were created by me using Excalidraw.
0. Background
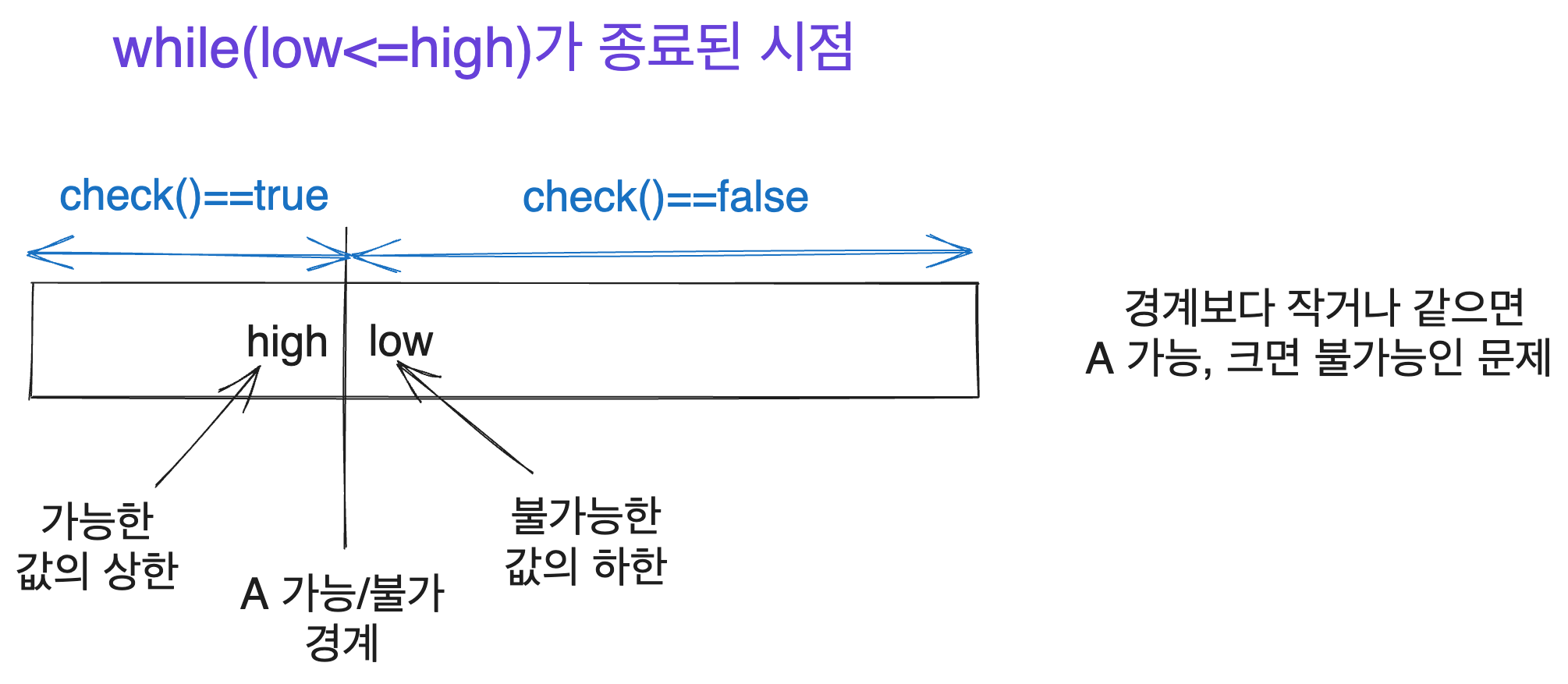
The first time I thoroughly understood binary search was when I implemented it with while(low<=high) and grasped what values low and high represent. This realization occurred when I saw a diagram similar to the one below shared by Yun. Anyone with experience in binary search will likely find something familiar in this illustration.
However, I later realized that many people implement binary search with different approaches, such as while(low<high) or while(low!=high). There are several other implementations, and I learned that these approaches can be applied differently as well.
Like many others, I learned binary search a few months after starting algorithms. Though I thought I quickly grasped the concept since it didn’t seem difficult, it took considerable time to use binary search effectively and achieve a deeper understanding. This process is still ongoing. I am still inadequate, but I will leave my insights here.
1. Problem Definition
I will reuse the problem definition I used in my previous article on the application of binary search. Since this article doesn’t cover the basics of binary search, I will write it briefly. It’s similar to the BOJ 1654 Cut a Cable problem.
We consider an interval [low, high]. There is a problem that can be represented by the check(number) function, where for a specific natural number x (), check(k) is true for natural numbers k that are less than or equal to x, and false for natural numbers greater than x. We aim to find the boundary x where the results of check transition.
The code I typically use to solve this problem is as follows. In this case, it is the code to find the maximum value for which check results in true. The explanation will follow in the next section.
while (low <= high) {
int mid = (low + high) / 2;
// If check is true at mid, search larger values
if (check(mid)) {
low = mid + 1;
} else {
high = mid - 1;
}
}
return high;
2. Various Implementations - Differences in Intervals
Binary search fundamentally involves narrowing down a set region to find some condition. The implementation can differ based on how the searching interval is defined, which affects when to terminate the search and which values to use to adjust the next search interval.
The widely used method for defining this interval usually involves a closed interval [low, high], a half-open interval [low, high), or an open interval (low, high). I will explain these different types of intervals. Each requires different termination conditions and updates for low and high.
2.1. Closed Interval Search
This is the implementation from earlier. It is the method I generally use.
while (low <= high) {
int mid = (low + high) / 2;
// If check is true at mid, search larger values
if (check(mid)) {
low = mid + 1;
} else {
high = mid - 1;
}
}
return high;
What interval does this code search and where does it lead?
The goal and operation of this code are as follows.
Assuming the natural number range from which the search starts is [start_low, start_high], the desired condition is to end the search with the valid interval [start_low, high] where check is true and the interval [low, start_high] where check is false. Here, low==high+1.
If check(mid) is true, then low must be at least greater than mid so that it can be the lower bound of the closed interval where the result is false. Thus, we update with low = mid + 1. The same reasoning applies to when check(mid) is false.
By assuming that all searching intervals are closed intervals, one can understand the updates of the intervals.
2.2. Half-Open Interval Search
Another implementation is based on searching a half-open interval [low, high).
while (low < high) {
int mid = (low + high) / 2;
// A is possible at mid
if (check(mid)) {
low = mid + 1;
} else {
high = mid;
}
}
What interval does this code search and where does it lead?
The objective and operational mechanism of this code are as follows.
Assuming the natural number range from which the search starts is [start_low, start_high), the intended outcome is the closure of the search ending in the interval [start_low, high) where check is true and the interval [low, start_high) where check is false. Here, low==high.
To reach this condition, if it is known that the boundary we are searching within [low, high) contains the value we seek, then if check is true at mid, we will continue the search in [mid+1, high) or, if false, restrict to [low, mid).
Unlike before, we update low to mid+1 and high to mid.
The logic concerning these values follows the explanations above. During the termination of the search, both low and high will be positioned at the boundaries defining the truthfulness of the check function. Here, high will represent the upper limit of the half-open interval where check is true, and low will signify the lower limit of the half-open interval where check is false.
Thus, when searching within a closed interval, one of either low or high would serve as an answer. Conversely, with a half-open interval, at the end of the search, low will equal high, meaning one must output either low or low-1 (or similarly high or high-1 based on the conditions). I think the lack of concern in deciding between low or high is an advantage of this approach.
Some implementers choose to define this half-open interval using while(low!=high), however, I believe this variation is too minor to warrant explanation.
2.3. Open Interval Search
I do not generally use this method, but it can be done, as recognized in an implementation from jinhan814. This is also quite common, though I had neglected to include it until someone provided feedback.
This, like before, involves finding the boundary of a region where check is typically true below and false above it, with the result being produced as low or high-1 (since both are equal).
// Adjust to encompass the original search interval entirely
low--;
high++;
while (low + 1 < high) {
int mid = (low + high) / 2;
if (check(mid)) {
low = mid;
} else {
high = mid;
}
}
The goal of this implementation is similar to the above; when the search begins within the interval (start_low, start_high), the process should terminate within (start_low, high) where check is true and (low, start_high) indicating it to be false. Here, low+1==high.
Thus, when check(mid) results in true, (low, start_high) would need to be false, so low is updated to mid.
Conversely, if check(mid) results in false, then high must serve as the upper limit of the true region, meaning it must remain at least less than or equal to mid, so high is indeed updated to mid.
Once the search completes, the goal is to determine the upper limit for which check is true, resulting in high-1. Given the termination condition indicates low==high-1, it is acceptable to return low as the output.
The advantage of this implementation lies in the greater intuitive selection between low and high for output. However, we know that the statement remains that high is always greater than low.
We defined true and false regions as (start_low, high) and (low, start_high) respectively, but considering the natural numbers involved, it may equally be noted that the true interval of check is (start_low, low] while the false region is [high, start_high).
In essence, the upper limit of the comparatively smaller true interval is low, while the lower limit of the relatively larger false interval is high. This understanding allows for a more intuitive identification of the values we seek.
2.3.1. Points of Caution
Since I personally do not use this implementation, I have not felt the need to reach the realizations, but it has been noted that care must be taken to ensure that low and high always represent the range of correct answers. Given the open interval context for implementation, the true search range is [low + 1, high - 1].
The preceding corrections of low-- and high++ are intended to accommodate this matter.
// Review of the implementation
// Adjust to encompass the original search interval entirely
low--;
high++;
while (low + 1 < high) {
int mid = (low + high) / 2;
if (check(mid)) {
low = mid;
} else {
high = mid;
}
}
2.4. Which is superior?
Which method is better? There is no definitive answer here. Generally, people tend to continue with the method they first learned. Statistically speaking, certain implementations may be more prevalent, yet both methods are beloved by numerous seasoned programmers.
The other implementations described and various minor versions have their own support from experienced users. Being proficient, these individuals can understand different methods. However, unless there’s compelling reason to adopt a new approach, the way one learned will often sustain.
I personally find searching with a closed interval intuitively more straightforward in most scenarios. Yet when searching through an array of length n, expressing the searching range as [0, n-1] seems less straightforward than using [0, n).
Ultimately, as this has never been a contentious issue, individuals are free to choose whichever manner they find most comfortable. It is evident that more programmers implement structures like segment trees using closed intervals, but I have yet to see anyone criticize those implementing half-open intervals.
Thus, after reading this and consulting many reference materials while solving numerous problems, feel free to adopt the approach that you can understand best.
3. Various Implementations - Differences in Approaches
3.1. Binary Jumping
This implementation is noted in a comment by dohoon on Jinhan814’s post. Friends have mentioned that this style occasionally appears in top-tier programmers’ codes found in AtCoder.
int cur = low - 1;
for (int step = high - low + 1; step >= 1; step /= 2) {
while (cur + step <= high && check(cur + step)) {
cur += step;
}
}
In this code, the idea is to ensure cur becomes the upper bound of the interval where check results in true. Unlike the previous approach of gradually narrowing the search, this code progressively increases cur as long as the check condition holds.
The conceptual framework of this approach is as follows. We can assume there exists a discrepancy x between the initial value cur set to low-1 and the answer we seek, which can be expressed as cur+x. Since it's guaranteed that our sought value lies within the range [low, high], we can assert this is valid.
Thus, we iteratively seek to maximize cur+x starting from the maximum allowable step to expand cur while checking check(cur+step) for true. If it is indeed true, cur increases. If false, we merely decrease the step by half.
Repeating this process, cur should reach the maximum upper bound satisfying check returning true.
Conversely, should we encounter the search query concerning the upper limit of a region constituted by [F, F, ..., F, T, ..., T], it can easily be inverted by adapting the conditional from check to check(cur + step) to !check(cur + step).
This modification results in:
int cur = low - 1;
for (int step = high - low + 1; step >= 1; step /= 2) {
// Changed to !check(cur + step)
while (cur + step <= high && !check(cur + step)) {
cur += step;
}
}
Initially using step to arrive at the high point was set as high-low+1, but actually, step can be initialized to high, as the number decreases naturally while moving forward according to what is achievable.
int cur = low - 1;
for (int step = high; step >= 1; step /= 2) {
while (cur + step <= high && check(cur + step)) {
cur += step;
}
}
In this case, the for loop continues iterating while simply adjusting step, which may lead to better compiler loop unrolling optimizations, sometimes improving performance by approximately 25% as indicated by benchmarking results. With the preprocessing of constants expressed as power of 2, an adaptation concludes faster execution—showcased in the benchmark data.
The binary jumping concept also finds application in other advanced algorithms, such as Fenwick Trees or LCA (Lowest Common Ancestor), making it a useful technique to familiarize oneself with.
3.2. Recursion
It is also possible to implement binary search via recursion. Many of us have seen this in data structure courses at least once.
int binary_search(int arr[], int n, int target) {
int mid = n / 2;
if (arr[mid] == target) {
return mid;
} else if (arr[mid] > target) {
return binary_search(arr, mid, target);
} else {
return binary_search(arr + mid + 1, n - mid - 1, target);
}
}
Those adept at recursion can easily transform this into parametric search. The following demonstrates a half-open interval search, yet I have yet to observe anyone who realistically implements it this way, perhaps due to recursion generally performing slower than iterative implementations, or possibly because the iterative code is not exceptionally unintuitive.
int binary_search(int low, int high) {
if (low == high) {
return low;
}
int mid = (low + high) / 2;
if (check(mid)) {
return binary_search(mid + 1, high);
} else {
return binary_search(low, mid);
}
}
4. Useful Insights
4.1. Defining mid=low+(high-low)/2
Many implementations define mid using the following common method:
int mid = (low+high)/2;
However, an alternative definition is also utilized in sources such as the Topcoder tutorial on binary search:
int mid = low + (high - low) / 2;
This serves a dual purpose: one, to prevent overflow. If high were to reach a maximum value of around (and thus low, high, etc., would naturally be declared as long long), calculating (low + high) / 2 could result in an overflow. To address this, we redefine it as low + (high - low) / 2.
The second rationale pertains to handling scenarios where low + high could yield a negative value. In binary search, we generally desire the result of /2 to round down. In many languages, integer division typically yields this behavior for positive numbers (e.g., 5 / 2 results in 2).
For negative numbers, however, this is uncertain; for example, -5 / 2 would round down as -3 yet might yield -2 in many languages like C++.
Consequently, restructuring mid as low + (high - low) / 2 ensures that /2 consistently rounds down.
C++ offers the std::midpoint function which effectively implements this redefinition.
Of course, this approach often suffices since the boundaries for problems related to binary search generally fall within positive constraints, with high named as long long comfortably defined within the order of 2e18. Most issues show ranges concluding around 1e18.
Thus, it is unusual to see the mid computed in this manner throughout the entirety of competitive programming.
4.2. Tips for Floating-Point Binary Search
Thanks to feedback from Lawali and YunGoon, I’ve added this section.
Similarly as with natural number ranges, floating-point binary search is viable, such as accurately locating the roots of monotonic function equations where solutions exist. Here, low, high, and mid are also defined as double, and the search proceeds similarly to previous methods.
However, due to the limitations of floating-point precision, exact comparisons can become unattainable. Thus, it is common to conclude binary search based on whether the difference between low and high remains sufficiently minor, often under a threshold of 1e-9, designated as eps (denoting epsilon).
double low = 0, high = 1e9;
double eps = 1e-9;
while (high - low > eps) {
double mid = (low + high) / 2;
if (check(mid)) {
low = mid;
} else {
high = mid;
}
}
However, this methodology risks entering an infinite loop as the precision issues may prevent high - low from ever falling below eps, potentially leading to timeouts.
Instead, it’s advisable to execute the binary search only for a fixed number of iterations with 200 typically being sufficient.
double low = 0, high = 1e9;
double eps = 1e-9;
for (int iter = 0; iter < 200 && high - low > eps; iter++) {
double mid = (low + high) / 2;
if (check(mid)) {
low = mid;
} else {
high = mid;
}
}
4.3. Cache Optimizations
Though we often execute parametric searches on various values stored in memory, certain techniques can enhance performance via cache optimization as detailed in this article on binary search caching.
Those reading this likely have experience employing lower_bound in C++, enabling you to find the first index where a specified value exceeds the target in a given array.
This implementation traditionally executes:
int lower_bound(int arr[], int n, int target) {
int low = 0, high = n;
while (low < high) {
int mid = (low + high) / 2;
if (arr[mid] < target) {
low = mid + 1;
} else {
high = mid;
}
}
return high;
}
While it property returns iterators rather than indices (for versatility across types), those distinctions aren't essential here.
During the course of code execution, the compiler employs caching considering spatial and temporal locality concepts, which we will not delve into here. However, the above example shows that mid changes frequently over larger steps without reusing previous values.
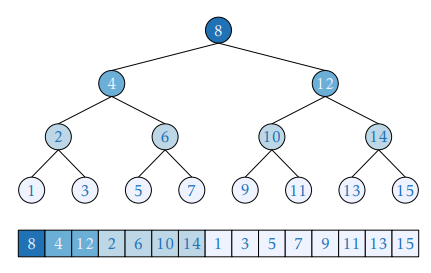
Enhancing this method draws from concepts shared in structures like segment trees, where a root node is designated to an explicit index—both k child nodes are subsequently built using 2*k and 2*k+1. A familiar pattern emerging, indicative of what appears frequently in binary search.
Thus, we can represent the array indices in the following structure. The innovative implementation, referred to as the Eytzinger method (named after Michaël Eytzinger) aligns array indices by facilitating binary search under restructured conditions.
The function to create such an indexed arrangement appears as follows. Though it utilizes recursion leading to apprehension about speed, the method is efficient due to all memory reads operating over continuous indices, significantly leveraging cache spatial locality.
const int MAX_N = 1e5;
int a[MAX_N], b[MAX_N+1];
int eytzinger(int i = 0, int k = 1) {
if (k <= n) {
i = eytzinger(i, 2 * k);
b[k] = a[i++];
i = eytzinger(i, 2 * k + 1);
}
return i;
}
Based on this restructured array, one can now create a lower_bound function returning the first index where values meet or exceed a certain number. Such an arrangement improves upon index access, enhancing cache spatial locality.
int search(int x) {
int k = 1;
while (k <= n) {
if (b[k] >= x)
k = 2 * k;
else
k = 2 * k + 1;
}
k >>= __builtin_ffs(~k);
return b[k];
}
This approach relates indices more closely than previously established, resulting in better cache locality. Additionally, regarding the inclusion of if statements, it prompts the compiler to predict branches, potentially leading to extra cycles if inaccurate.
To methodically avoid such issues, consider the code below, which eliminates explicit conditionality.
int search(int x) {
int k = 1;
while (k <= n) {
k = 2 * k + (b[k] < x);
}
k >>= __builtin_ffs(~k);
return b[k];
}
By removing if statements, this alternative sidesteps additional cycles due to branch prediction failures, yielding performance enhancements with specific larger-scale arrays. Yet, it's noted that such implementations may sometimes perform slower, particularly when the values involved prompt the compiler to prefetch crucial, high-throughput analyses.
You may familiarize yourself with the use of __builtin_prefetch to initiate prefetch operations even without if statements:
int search(int x) {
int k = 1;
while (k <= n) {
__builtin_prefetch(&b[2 * k + (b[k] < x)]);
k = 2 * k + (b[k] < x);
}
k >>= __builtin_ffs(~k);
return b[k];
}
Executing binary search through this method not only fosters familiarity with such techniques but also can yield impressively fast results with large arrays. Benchmarking images can be found in provided reference materials.
Reference materials: https://algorithmica.org/en/eytzinger
https://en.algorithmica.org/hpc/data-structures/binary-search/
5. Additional Information
A few additional algorithms related to binary search are introduced. My understanding of these is quite basic, and I feel these diverge significantly from an in-depth comprehension of binary search. However, they might be intuitive, which is the aim of this introductory outline.
5.1. Ternary Search
This algorithm can be useful when locating extrema or maximum and minimum values within a convex function.
While binary search serves to find the maximum value for which the output is true in established conditions [T, T, T,..., T, F, ..., F], this can extend to identifying intersections with a monotonically increasing function:
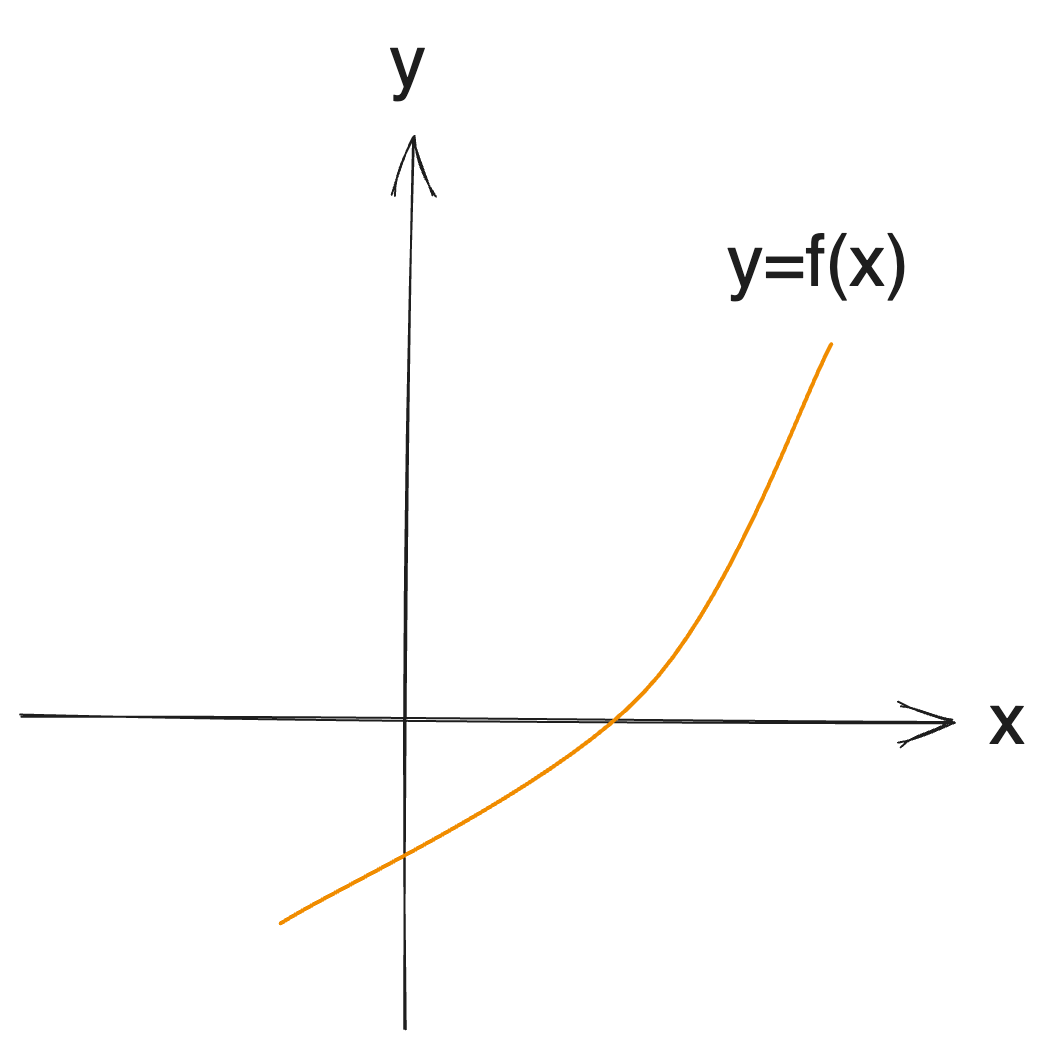
Thus, if the values at f(low) and f(high) present differing signs, then there exists a root within [low, high] confirmed by binary search. It can also provide a means to define a decision problem regarding f(x) < 0.
Conversely, the concept can readily be adapted to convex functions (unimodal functions); this slight variation in approach is termed a ternary search:
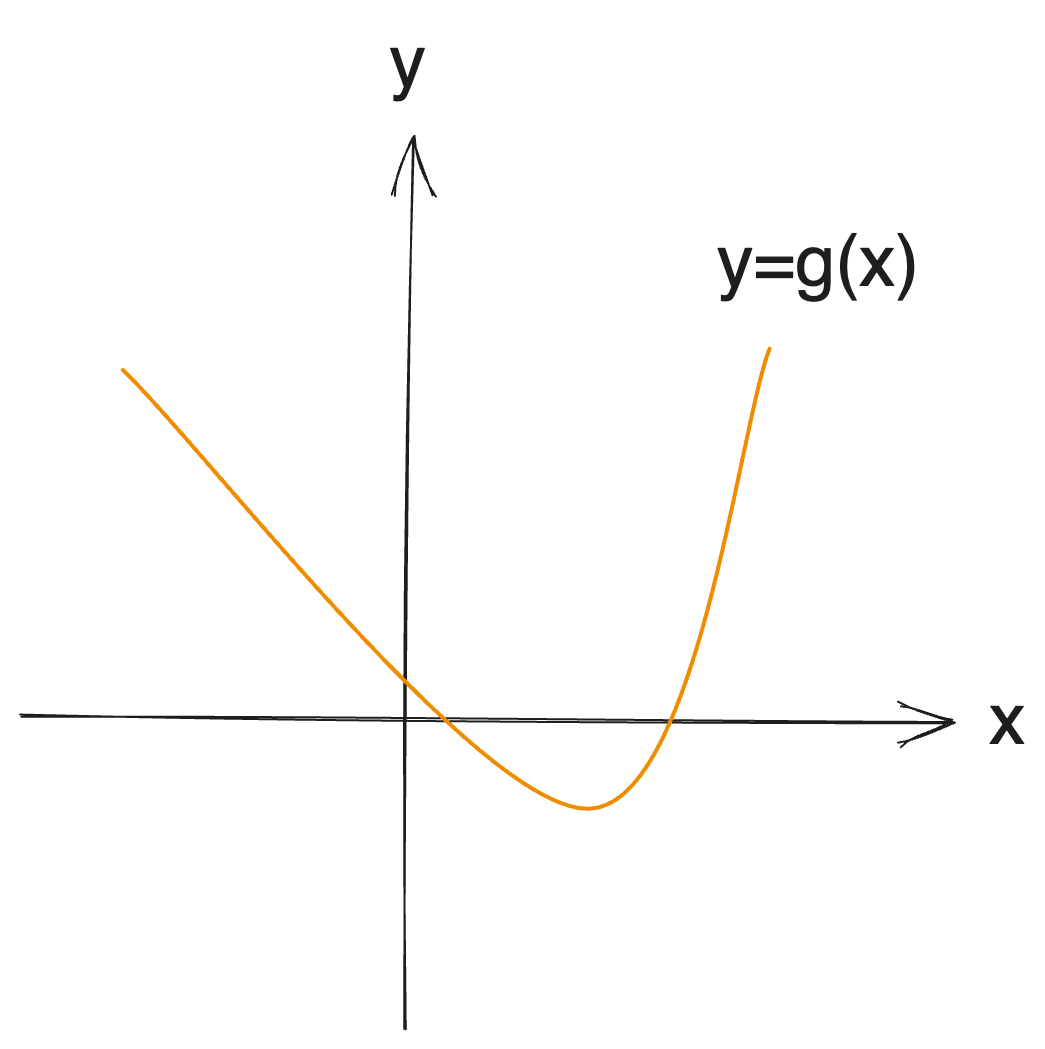
When searching for a specific extremum, given bounds, we can leverage comparisons between the endpoints and the midpoints to optimize the search range down to 1/3.
For those curious about ternary search, I recommend referring to kks227’s article. https://blog.naver.com/kks227/221432986308
5.1.1. Alternative Interval Division
Ultimately, what binary search's objective demonstrates is efficient narrowing toward sought values, with interval reductions made in constant proportions to yield logarithmic time complexities.
Should seasoned programmers exhibit interest in such variations, An alternative and very interesting approach to binary search elucidates the division technique, presenting ratio formulations not restricted to 1:1, marking a distinct impact on time complexity.
5.2. Parallel Binary Search
A concept worth exploring extends beyond the usual binary search, capable of supporting multiple queries simultaneously—referred to as parallel binary search.
Instances where general decision problems can be denoted by a check function, might require substantial time complexity to evaluate. For instance, the BOJ 1300 K-th Element Problem faces challenges in calculating whether the number of values less than or equal to mid exceeds K, presenting considerable computation time, perhaps marked as f(N).
In this case, one-time determination of a value using binary search results in f(N)logN. With Q such assessments posed, resolutions within traditional binary search involve Qf(N)logN.
Had we derived a method to handle the results iteratively across all decision problems with an upfront cost of evaluating f(N)logN, subsequent operations would simply entail the binary search execution, yielding a resource-efficient maximum of (f(N) + Q)logN to resolve the issue.
This implementation diverges subtly, fostering unfamiliarity and I do not possess great familiarity with this approach, although interested readers could find further insights in kks227’s writing. Najeonghui’s post also presents vast information.
5.3. Segment Tree Binary Search
This concept would lend itself well to occurrences illustrated in problems such as BOJ 2243 Candy Box. Segment trees recursively traverse both child nodes over given queries, modifying their duties by adjusting conducted operations based on the check function's outcomes.
When addressing K-th value determinations via segment trees tracking frequencies, the retrieval of K-th values can easily be implemented similarly.
int kth(int cur, int s, int e, int k){
// Returns the kth element
if(s==e){return s;}
int mid=(s+e)/2;
if(k<=tree[cur*2]){
return kth(cur*2, s, mid, k);
}
else{
return kth(cur*2+1, mid+1, e, k-tree[cur*2]);
}
}
References
Binary search implementation without mistakes: https://blog.fiene.dev/2023/01/16/binary-search.html
jinhan814's article on binary search (to avoid confusion): https://www.acmicpc.net/blog/view/109
jinhan814's blog post on binary search: https://blog.naver.com/jinhan814/222607789392
[Tutorial] Binary search and other "halving" methods: https://codeforces.com/blog/entry/96699
Topcoder's article on binary search: https://www.topcoder.com/thrive/articles/Binary+Search